GPIO
本章节将对内核GPIO模块进行介绍。
GPIO (General Purpose Input Output,通用输入输出)有时也被称为 IO 口。既能输出也能输入。是嵌入式系统中重要的一部分。
在 Linux 系统中,GPIO 通常由 Pinctrl 系统进行管理。Linux 定义了 Pinctrl 框架,统一了各大 SoC 厂商的 Pin 管理方式,避免了各大厂商自行实现自己的 Pin 管理系统,是一个非常有用的功能。
Pinctrl 系统
许多 SoC 内部都包含 Pin 控制器,通过 Pin 控制器,我们可以配置一个或一组引脚的功能和特 性。在软件上,Linux 内核 Pinctrl 驱动可以操作 Pin 控制器为我们完成如下工作:
- 在 Linux 中命名 pin 控制器可以控制的所有引脚
- 提供引脚的复用功能
- 提供配置引脚的能力,如驱动能力、上拉下拉、数据属性等
- 与 gpio 子系统的交互
- 实现中断
针对全志平台,使用的框架叫做 SUNXI Pinctrl,其框架如下图所示。整个驱动模块可以分成 4 个部分:Pinctrl Interface、Pinctrl Framework、Pinctrl Driver,以及 Device Tree。
Pinctrl Interface:提供给上层用户调用的接口,可以给各类外设驱动,也可以提供 GPIO 子系统的接口。Pinctrl Framework:Linux 提供的 Pinctrl 驱动框架。Pinctrl Driver:底层 Pin 控制器的驱动,对于全志平台则是 SUNXI Pinctrl。Device Tree:设备 Pin 配置信息,一般保存在设备树里。
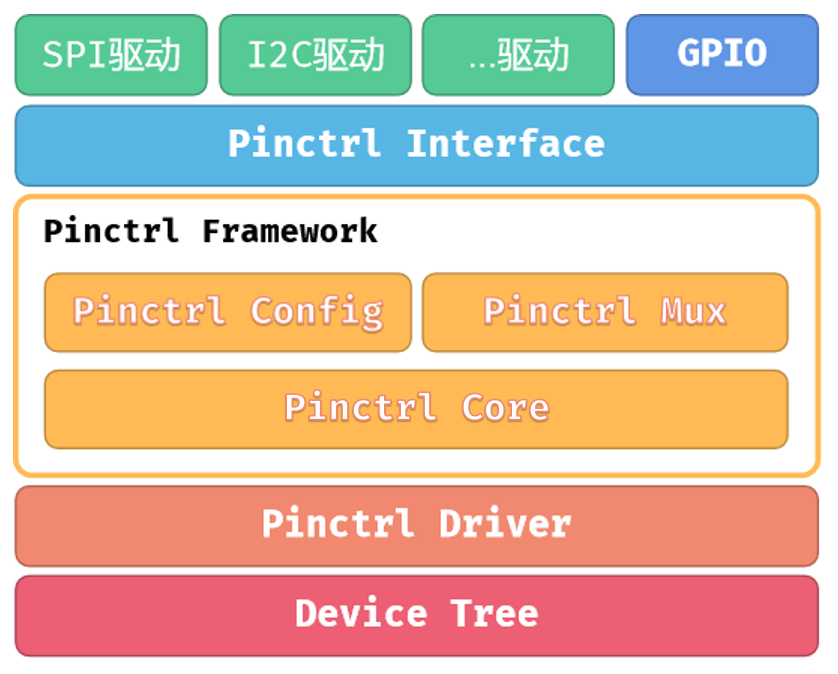
而 Pinctrl Framework 主要处理 Pin State、Pin Mux 和 Pin Config 三个功能
(1)Pin State:系统运行在不同的状态,其 Pin 的配置有可能不一样,比如系统正常运行时,设备的 Pin 需要一组配置,但系统进入休眠时,为了节省功耗,设备 Pin 需要另一组配置。Pinctrl Framwork 提供了三种 Pin State可供切换:default, sleep, idle,对应正常模式,休眠模式 和 空闲模式。
(2)Pin Mux:Pin 的功能不是唯一的,一个 Pin 可能支持很多功能。例如 查阅 GPIO MUX 表格,可以看到 PE0 这个 Pin 有 8 个 MUX。当我想用 PE0 作为 PWM 输出的时候,我就需要设置 PE0 的 Pin Mux 为 5。
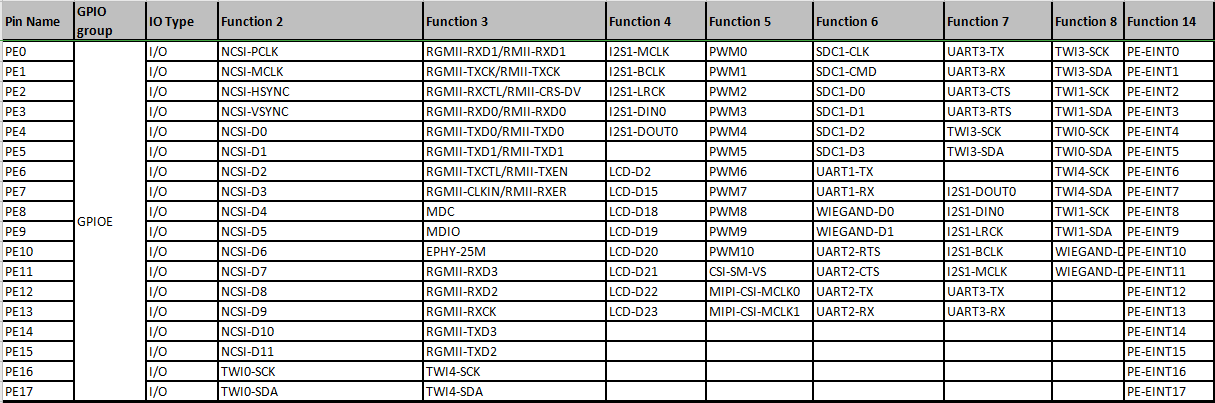
你可能注意到了,Pin Function 的 id 并不是从 0 开始的。例如这里没有 Function 0、1,因为 Function 0 是单向输入模式,Function 1 是单向输出模式,由于所有引脚都具有这样的功能,所以在 PinMux 表内就被省略了。另外这里 Function 8 后其实有 Function 9~13,但是因为没有绑定对应功能所以在 PinMux 表内被省略了。Function 14 是中断的 mux,而 Function 15 表示关闭这个 Pin。
所以完整的 PinMux 表应该是这样的(以 PE0 为例 Function 简写为 F):
| Pin Name | F0 | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 | F9 | F10 | F11 | F12 | F13 | F14 | F15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PE0 | 输入 | 输出 | NCSI-PCLK | RGMII-RXD1 | I2S-MCLK | PWM0 | SDC1-CLK | UART3-TX | TWI3-SCK | 保留 | 保留 | 保留 | 保留 | 保留 | 中断 | 关闭 |
(3)Pin Config:读取设备树里的 Pin 的配置文件,并确定 Pin 的驱动能力、上拉下拉、数据属性。同时也提供上层驱动的接口。
下面是 Pinctrl 源码结构
linux
|
|-- drivers
| |-- pinctrl # Linux Kernel 的实现
| | |-- Kconfig
| | |-- Makefile
| | |-- core.c
| | |-- core.h
| | |-- devicetree.c
| | |-- devicetree.h
| | |-- pinconf.c
| | |-- pinconf.h
| | |-- pinmux.c
| | `-- pinmux.h
| `-- sunxi # 全志平台的实现
| |-- pinctrl-sunxi-test.c
| |-- pinctrl-sun*.c
| `-- pinctrl-sun*-r.c
`-- include # 头文件
`-- linux
`-- pinctrl
|-- consumer.h
|-- devinfo.h
|-- machine.h
|-- pinconf-generic.h
|-- pinconf.h
|-- pinctrl-state.h
|-- pinctrl.h
`-- pinmux.h
设备树配置
Pinctrl 的设备树分为三个部分:
第一部分包括基础的寄存器配置、设备驱动绑定配置和时钟中断配置,还定义了一些基础的 Pin 的绑定。这一部分的配置位于 kernel/linux-4.9/arch/arm/boot/dts/sun8iw21p1-pinctrl.dtsi 文件内。这一部分通常不需要修改。
目前,在全志平台,根据电源域注册了两个 Pinctrl 设备,分别是:r_pio 设备 (PL0 后的所有 Pin(包括PL0)) 和 pio 设备 (PL0 前的所有 Pin),这里截取一部分简单说明下各个配置的信息。
r_pio: pinctrl@07022000 {
compatible = "allwinner,sun8iw21p1-r-pinctrl"; // 兼容属性,用于驱动和设备绑定
reg = <0x0 0x07022000 0x0 0x400>; // 寄存器基地址0x07022000和范围0x400
interrupts = <GIC_SPI 106 4>; // 该设备每个bank支持的中断配置和gic中断号
device_type = "r_pio"; // 设备类型属性
gpio-controller; // 表示是一个gpio控制器
interrupt-controller; // 表示是一个中断控制器
#interrupt-cells = <3>; // Pin 中断属性需要配置的参数个数
#size-cells = <0>; // 没有使用,配置0
};
pio: pinctrl@02000000 {
compatible = "allwinner,sun8iw21p1-pinctrl"; // 兼容属性,用于驱动和设备绑定
reg = <0x0 0x02000000 0x0 0x400>; // 寄存器基地址0x02000000和范围0x400
interrupts = <GIC_SPI 67 IRQ_TYPE_LEVEL_HIGH>, // 该设备每个bank支持的中断配置和
<GIC_SPI 71 IRQ_TYPE_LEVEL_HIGH>, // gic中断号,每个中断号对应一个
<GIC_SPI 73 IRQ_TYPE_LEVEL_HIGH>, // 支持中断的bank
<GIC_SPI 75 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 77 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 79 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 81 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 83 IRQ_TYPE_LEVEL_HIGH>;
device_type = "pio"; // 设备类型属性
clocks = <&clk_apb0>; // 该设备使用的时钟
gpio-controller; // 表示是一个gpio控制器
interrupt-controller; // 表示是一个中断控制器
#interrupt-cells = <3>; // pin中断属性需要配置的参数个数
#size-cells = <0>; // 没有使用这个配置
#gpio-cells = <6>; // gpio属性需要配置的参数个数
input-debounce = <0 0 0 1 0 0 0>; // 配置中断采样频率
// 每个对应一个支持中断的bank,单位us
uart0_pins_a: uart0@0 { // uart0_pins_a 模块
allwinner,pins = "PH9", "PH10"; // 绑定的引脚
allwinner,function = "uart0"; // 给定设备类型属性
allwinner,muxsel = <5>; // 选择 5 号功能的 mux
allwinner,drive = <1>; // Pin 的驱动力
allwinner,pull = <1>; // 默认上拉
};
};
第二部分定义了 Pin 的其他功能,扩展功能等等,位于 device/config/chips/v853/configs/vision/board.dts 设备树内。这里也截取一部分。
&pio {
wlan_pins_a: wlan@0 {
allwinner,pins = "PG6";
allwinner,function = "fanout0";
allwinner,muxsel = <3>;
};
uart0_pins_active: uart0@0 {
allwinner,pins = "PH9", "PH10";
allwinner,function = "uart0";
allwinner,muxsel = <5>;
allwinner,drive = <1>;
allwinner,pull = <1>;
};
uart0_pins_sleep: uart0@1 {
allwinner,pins = "PH9", "PH10";
allwinner,function = "gpio_in";
allwinner,muxsel = <0>;
};
uart1_pins_active: uart1@0 {
allwinner,pins = "PG6", "PG7";
allwinner,function = "uart1";
allwinner,muxsel = <4>;
allwinner,drive = <1>;
allwinner,pull = <1>;
};
uart1_pins_sleep: uart1@1 {
allwinner,pins = "PG6", "PG7";
allwinner,function = "gpio_in";
allwinner,muxsel = <0>;
};
uart2_pins_active: uart2@0 {
allwinner,pins = "PE12", "PE13", "PE10", "PE11";
allwinner,function = "uart2";
allwinner,muxsel = <6>;
allwinner,drive = <1>;
allwinner,pull = <1>;
};
uart2_pins_sleep: uart2@1 {
allwinner,pins = "PE12", "PE13", "PE10", "PE11";
allwinner,function = "gpio_in";
allwinner,muxsel = <0>;
};
... 下略 ...
第三部分则是对接驱动的配置,对于使用 Pin 的驱动来说,设备树里主要设置了 Pin 的常见的三种功能:
- 只配置通用GPIO,即用来做输入、输出和中断的那部分
- 需要设置 Pin 的 Pin Mux,如 UART 设备的 Pin,MIPI LCD 设备的 MIPI 数据 Pin 等,用于特殊功能
- 驱动使用者既要配置 Pin 的通用功能,也要配置 Pin 的特性
下面对这三种常见配置举例:
(1)只配置通用GPIO,即用来做输入、输出和中断的那部分 :
需求:
USB 的 OTG ID 脚接到了 PE0 引脚上,当插入的是 U盘 等下位机设备时切换 OTG 到 HOST 模式,当插入 电脑 等上位机连接开发板 ADB 时,切换 OTG 到 DEVICE 模式。
当设备检测到 ID 信号为低时,表该设备应作为 Host(主机,也称A设备)用。
当设备检测到 ID 信号为高时,表示该设备作为 Device (外设,也称B设备)用。
这是他的配置,我们重点关注 usb_id_gpio = <&pio PE 0 0 1 0xffffffff 0xffffffff>; 这一部分
&usbc0 {
device_type = "usbc0";
usb_port_type = <0x2>;
usb_detect_type = <0x1>;
usb_detect_mode = <0x0>;
usb_id_gpio = <&pio PE 0 0 1 0xffffffff 0xffffffff>; // 重点
usb_det_vbus_gpio = "axp_ctrl";
det_vbus_supply = <&gpio_charger>;
usb_regulator_io = "nocare";
usb_wakeup_suspend = <0x0>;
usb_luns = <0x3>;
usb_serial_unique = <0x0>;
usb_serial_number = "20080411";
status = "okay";
};
其中的 gpios = <&pio PE 0 0 1 0xffffffff 0xffffffff>; 定义如下:
gpios = <&pio PE 0 0 1 0 0xffffffff>;
| | | | | | `---输出电平,只有output才有效,这里是输入所以不使用
| | | | | `-------驱动能力,值为 0 时采用默认值
| | | | `-----------上下拉,值为 1 时采用默认值,这里默认上拉
| | | `---------------复用类型,这里是输入,所以是 Function 0 复用
| | `-------------------当前 bank 中哪个引脚,这里是 PE 组内 0 号引脚
| `-----------------------哪个 bank,这里是 PE Pin 组
`---------------------------指向哪个 pio,PL0 后要用 &r_pio
(2)需要设置 Pin 的 Pin Mux,如 UART 设备的 Pin,MIPI LCD 设备的 MIPI 数据 Pin 等,用于特殊功能
需求:
配置 PH9,PH10 作为 UART0
这里是他的配置,由于 PH Bank 在 PL 之前,所以需要在 &pio 内配置uart的
&pio {
uart0_pins_active: uart0@0 { // 正常模式使用的 pinctrl
allwinner,pins = "PH9", "PH10"; // 使用PH9, PH10 引脚
allwinner,function = "uart0"; // 功能是 uart0
allwinner,muxsel = <5>; // 查阅复用表得知是 Function 5
allwinner,drive = <1>; // 驱动力设置 1
allwinner,pull = <1>; // 默认上拉
};
uart0_pins_sleep: uart0@1 { // 休眠模式使用的 pinctrl
allwinner,pins = "PH9", "PH10"; // 使用PH9, PH10 引脚
allwinner,function = "gpio_in"; // 功能是 gpio_in
allwinner,muxsel = <0>; // 设置为输入模式
};
};
&uart0 {
pinctrl-names = "default", "sleep"; // 两个 pinctrl 工作模式的名称
pinctrl-0 = <&uart0_pins_active>; // 模块正常模式下对应的 Pin 配置
pinctrl-1 = <&uart0_pins_sleep>; // 模块休眠模式下对应的 Pin 配置
status = "okay"; // 启用这个模块
};
其中的:
pinctrl-0对应pinctrl-names中的default,即模块正常工作模式下对应的 Pin 配置pinctrl-1对应pinctrl-names中的sleep,即模块休眠模式下对应的 Pin 配置
(3)驱动使用者既要配置 Pin 的通用功能,也要配置 Pin 的特性
需求:
需要驱动一块使用 GT911 驱动芯片的触摸屏,触摸屏使用 TWI 与 SoC 通讯,并且使用 SoC 的 TWI2 与触摸屏通讯。触摸屏的引脚与 SoC 连接方式如下表:
| SCK | SDA | INT | RST |
|---|---|---|---|
| PH5 | PH6 | PH7 | PH8 |
这时就需要配置两个部分,第一部分是 TWI 接口的特殊功能(同样,这里只注意 Pin相关的配置,TWI 相关的配置不用理会)
&pio {
twi2_pins_a: twi2@0 { // 正常模式使用的 pinctrl
allwinner,pins = "PH5", "PH6"; // 使用 PH5 PH6 引脚
allwinner,pname = "twi2_scl", "twi2_sda"; // 两个脚的名称
allwinner,function = "twi2"; // 功能是 twi2
allwinner,muxsel = <4>; // 查询可知是 Function 4
allwinner,drive = <0>; // TWI 是开漏输出外部上拉的,所以驱动能力为0
allwinner,pull = <1>; // 当然也可以使用芯片自己配置上拉,不过芯片驱动能力较弱可能导致上拉不完全
};
twi2_pins_b: twi2@1 { // 休眠模式使用的 pinctrl
allwinner,pins = "PH5", "PH6"; // 使用 PH5 PH6 引脚
allwinner,function = "io_disabled"; // 禁用这个脚
allwinner,muxsel = <0xf>; // 16进制的15,在mux表内表示关闭
allwinner,drive = <0>; // 驱动能力0
allwinner,pull = <0>; // 不上拉
};
};
&twi2 {
pinctrl-0 = <&twi2_pins_a>; // 模块正常模式下对应的 Pin 配置
pinctrl-1 = <&twi2_pins_b>; // 模块休眠模式下对应的 Pin 配置
pinctrl-names = "default", "sleep"; // 两个 pinctrl 工作模式的名称
clock-frequency = <400000>;
twi_drv_used = <0>;
twi_pkt_interval = <0>;
status = "okay"; // 启用模块
goodix {
compatible = "goodix,gt911";
reg = <0x40>;
int-gpios = <&pio PH 7 0 0 1 0>; // 配置 PH7,输入模式
reset-gpios = <&pio PH 8 1 0 1 0>; // 配置 PH8,输出模式
touchscreen-size-x = <1280>;
touchscreen-size-y = <720>;
status = "okay"; // 启用模块
};
};
Kernel 配置
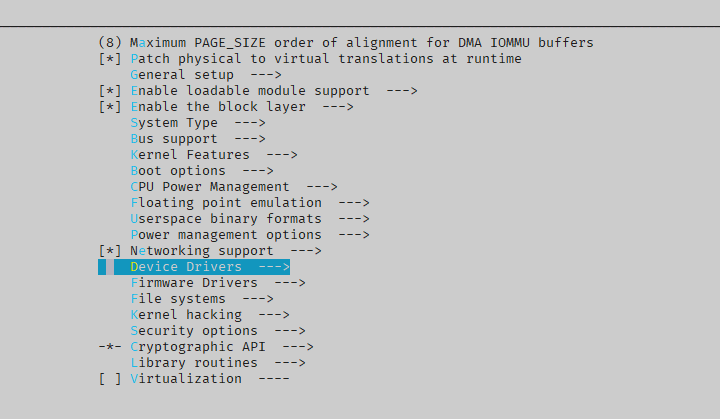
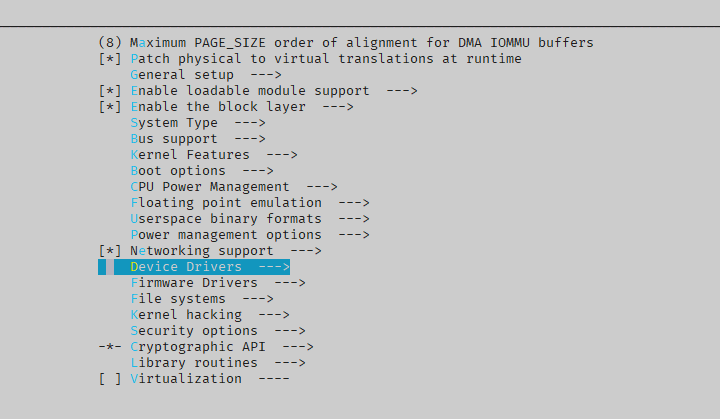
make kernel_menuconfig 进入配置主界面,选择 Device Drivers 并进入
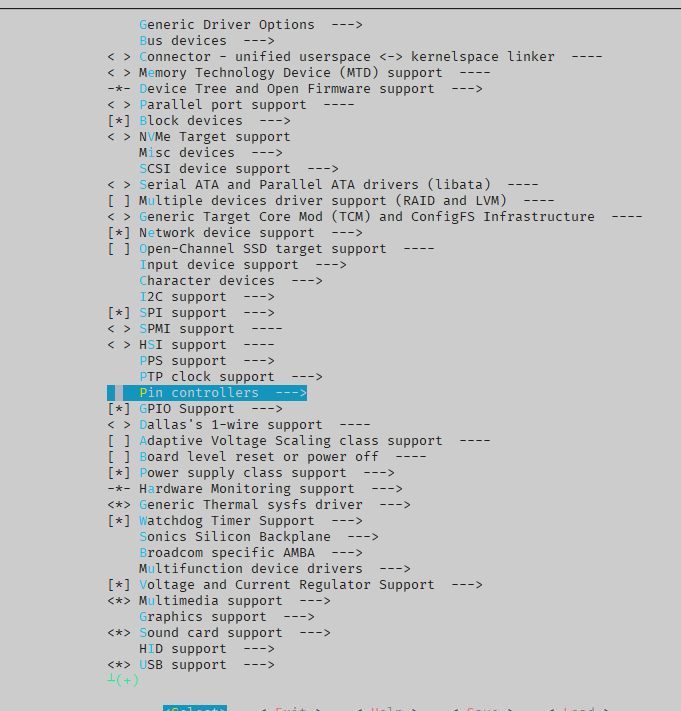
找到 Pin controllers ,进入下一级菜单
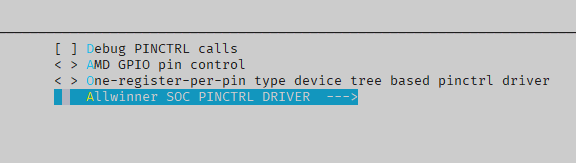
找到 Allwinner SOC PINCTRL DRIVER 进入下一级菜单
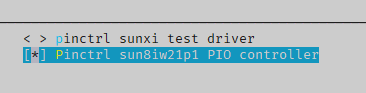
勾选 [*] Pinctrl sun8iw21p1 PIO controller 即可
使用 GPIO
这里通过两个小例子来介绍下怎么使用 GPIO 驱动(点灯)
使用 Linux 的文件节点点亮一颗 LED
Linux 里万物皆为文件,GPIO 也不例外,接下来就介绍下怎么使用 Linux 的文件节点点灯。
(1)启用 GPIO 子系统的文件调用界面
GPIO 子系统是基于 Pinctrl 框架下的最简单的 GPIO 操作软件。而它又提供了一套简单的文件系统可以直接以文件进行操作。
先配置下内核, make kernel_menuconfig 进入配置主界面,选择 Device Drivers 并进入
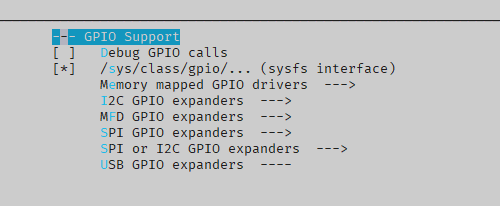
找到 GPIO Support 进入下级菜单
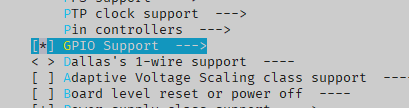
勾选下 [*] /sys/class/gpio/... (sysfs interface)
编译,烧写即可。
(2)找到需要点亮的 GPIO
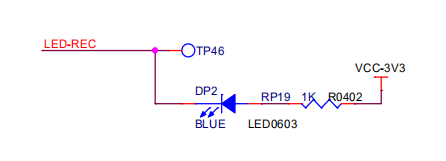
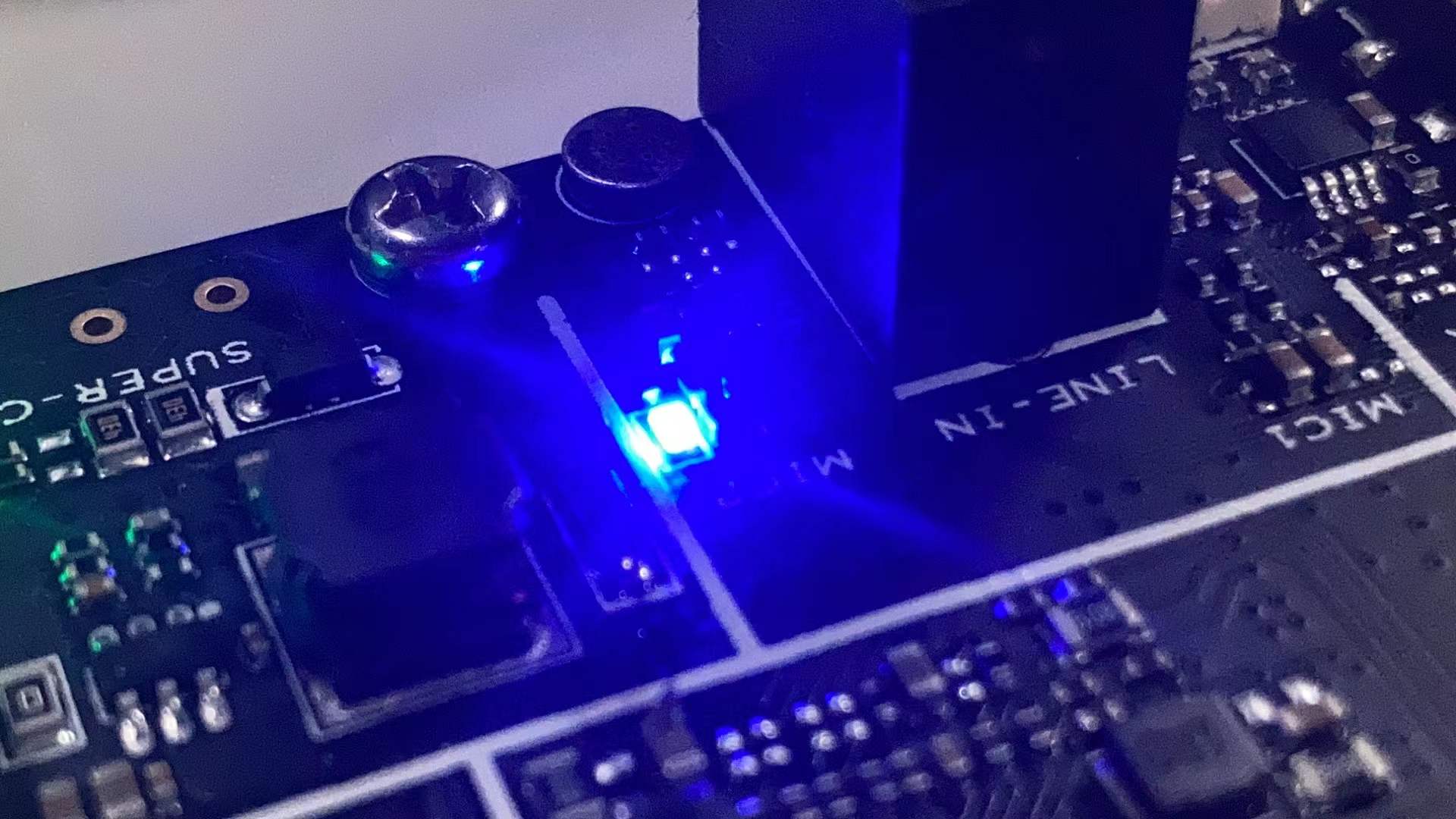
看一下原理图,可以看到有一颗名叫 DP2 的 LED 灯,通过网络标签 LED-REC 连接到主控的 PH11 脚上,拉低就能点亮。
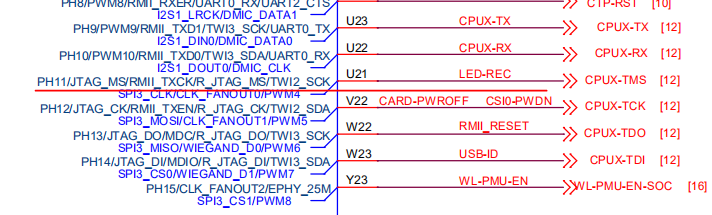
我们来计算下 PH11 的 IO 号 7 * 32 + 11 = 235,那就导出 235 号 GPIO
root@TinaLinux:/# echo 235 > /sys/class/gpio/export
然后到导出的文件节点查看下
root@TinaLinux:/# cd /sys/class/gpio/gpio235
root@TinaLinux:/# ls

可以看到一些文件,我们可以通过读写这些文件来点亮这颗 LED
- 首先设置 GPIO 为输出状态
root@TinaLinux:/# echo out > direction
- 然后点亮 LED
root@TinaLinux:/# echo 0 > value
- 也可以关闭
root@TinaLinux:/# echo 1 > value
编写一个内核驱动,点亮 LED
首先我们编写这样一个内核驱动程序 led.c:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <mach/gpio.h>
#include <linux/gpio.h>
#include <linux/delay.h>
#include <linux/interrupt.h>
#include <linux/poll.h>
#include <linux/sched.h>
#include <linux/wait.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/device.h>
#define COUNT 1
#define LED_IO GPIOH(11) // 要点亮的 led
#define dev_name "V853_LED"
dev_t device_id; // 存放设备 ID
struct cdev led_cdev; // led cdev 结构
static struct class *led_class; // led 类操作
// 定义 Open 函数
static int led_open(struct inode *inode_, struct file *file_)
{
int ret;
ret = gpio_request(LED_IO, "led_0");
if (ret < 0)
{
return ret;
}
else
{
gpio_direction_output(LED_IO, 0);
return 0;
}
}
// 定义写操作
static ssize_t led_write(struct file *file_, const char *__user buf_, size_t len_, loff_t *loff_)
{
char stat; int ret;
ret = copy_from_user(&stat, buf_, sizeof(char)); // 读取用户写入的信息
if(ret < 0)
return ret;
if (!stat) // 因为 LED 是下拉点亮,所以反选,如果是上拉点亮那就删除 !
{
gpio_set_value(LED_IO, 0); // 点亮一颗 LED
}
else
{
gpio_set_value(LED_IO, 1); // 熄灭 LED
}
return 0;
}
// 关闭 GPIO 操作
static int led_close(struct inode *inode_, struct file *file_)
{
gpio_set_value(LED_IO, 0); // 恢复 IO 状态
gpio_free(LED_IO); // 清除绑定
return 0;
}
// 封包为文件系统操作接口
static struct file_operations led_file_operations = {
.owner = THIS_MODULE,
.open = led_open,
.write = led_write,
.release = led_close,
};
// 初始化设备使用的操作
static int __init led_init(void)
{
int ret;
device_id = MKDEV(3242, 3432); // 随便定义的 设备id
ret = register_chrdev_region(device_id, COUNT, dev_name); // 注册设备
if (ret < 0)
{
return ret;
}
cdev_init(&led_cdev, &led_file_operations);
led_cdev.owner = THIS_MODULE;
ret = cdev_add(&led_cdev, device_id, COUNT); // 加入到 cdev
if (ret < 0)
{
unregister_chrdev_region(device_id, COUNT);
}
led_class = class_create(THIS_MODULE, "led_class"); // 创建类
if (led_class == NULL)
{
cdev_del(&led_cdev);
}
device_create(led_class, NULL, device_id, NULL, dev_name); // 创建设备
return 0;
}
// 删除设备的操作
static void __exit led_exit(void)
{
// 刚才怎么创建的就怎么删除
device_destroy(led_class, device_id);
class_destroy(led_class);
unregister_chrdev_region(device_id, COUNT);
cdev_del(&led_cdev);
gpio_free(LED_IO);
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("WTFPL");
MODULE_AUTHOR("AWOL");
MODULE_DESCRIPTION("light up v853 vision led");
MODULE_VERSION("1.0");
然后编写 Makefile
obj-$(CONFIG_V853_LED) += led.o
和 Kconfig
config V853_LED
tristate "Light up V853 Vision LED"
help
Light up V853 Vision LED
这里把这个驱动文件保存到了 kernel/linux-4.9/drivers/staging/led/ 文件夹内。作为 staging drivers 编译。你也可以放到其他地方。不过基本操作都是一样的。
然后再编辑下 staging 文件夹的 Makefile 与 Kconfig
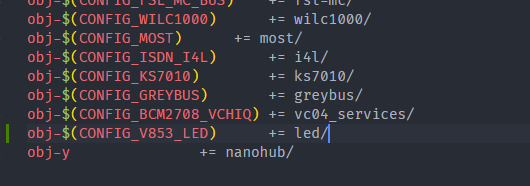
编辑 kernel/linux-4.9/drivers/staging/Makefile 加入编译选项
obj-$(CONFIG_V853_LED) += led/
编辑 kernel/linux-4.9/drivers/staging/Kconfig ,增加 Kconfig 引索
source "drivers/staging/led/Kconfig"

最后 make kernel_menuconfig 到下列文件夹内找到 Light up V853 Vision LED 选项
-> Device Drivers
-> Staging drivers
-> <*> Light up V853 Vision LED
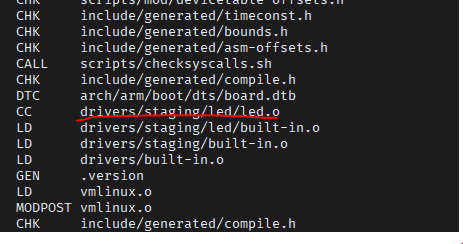
编译打包 mp ,编译的时候可以看到 led.o 被编译了
烧录后便可以看到 V853_LED 设备
root@TinaLinux:/# ls /dev/
这时可以使用 echo 命令点亮 LED,ctrl + c 键退出时 LED 熄灭
root@TinaLinux:/# echo 1 > /dev/V853_LED

我们也可以编写一个小程序,在程序中访问这个设备。比如这里的闪灯Demo
#include <stdio.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
int main(int argc, char **argv)
{
int fd;
char LED_ON = 1, LED_OFF = 0;
fd = open("/dev/V853_LED", O_RDWR);
if (fd < 0)
{
perror("open device V853_LED error");
}
while (1)
{
write(fd, &LED_ON, 1);
sleep(1);
write(fd, &LED_OFF, 1);
sleep(1);
}
return 0;
}